
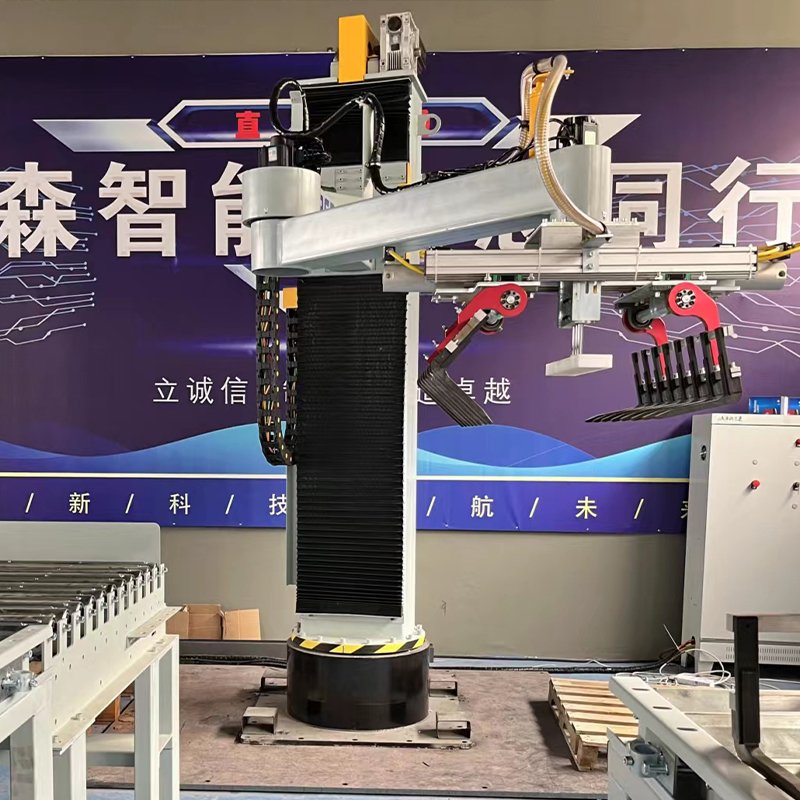
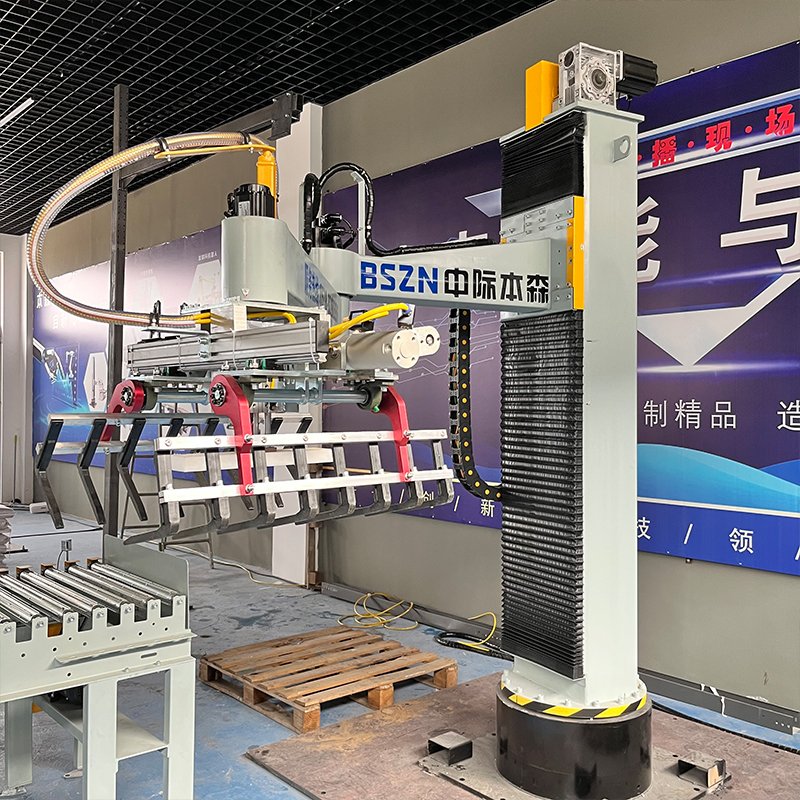

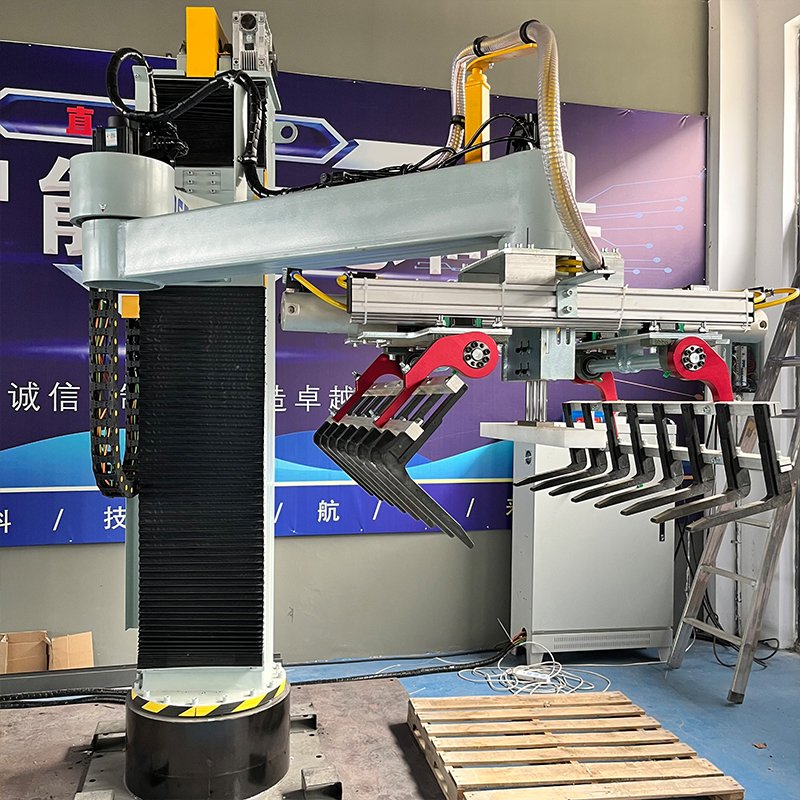

روبوت الكرتون التلقائي
بعد أن تكمل جهاز التعبئة التلقائي تعبئة المنتج ، يدخل حزام النقل ، ويتم نقل المنتج إلى آلة ختم الصندوق ، ثم يمر عبر حزام ناقل آخر. في خط النقل هذا ، يوجد جهاز تحديد موضعي ، يمكن أن يطلق عليه أيضًا حرس تحديد المواقع ، يمكن لهذا الجهاز ولوحة تحديد المواقع إكمال دوران مواد الصندوق ووضعه ، والذي يمكن أن يجعل مواد الصندوق موضحة بواسطة جانب واحد ، ثم يتم نقلها إلى منطقة المخزن المؤقت ، والروبوت المكاني فوق المنطقة المخزن المؤقت. يرفع الروبوت مادة الحاوية بأكملها رأسياً من خلال المعالج ثم يركض أفقياً لتجنب قناة السلامة. بعد المرور عبر قناة السلامة ، يتم وضعها رأسياً في منطقة تحريك البليت. بعد اكتمال الموضع ، يعود وفقًا للمسار الأصلي.
يمكن لنظام التعبئة والتغليف الذكي إكمال تغليف المنتجات ، والرفع الثقيل ، والتعامل ، والتقليب ، والرسو ، وزاوية الصقل ، وحركة تحميل الفضاء ثلاثية الأبعاد الأخرى ، مما يوفر أدوات معالجة وتجميع مثالية لتجميع خط المنتج. لا يقلل معالج التحميل والتفريغ البليت الذكي عن كثافة العمالة للعملية لتوفير معالجة آمنة للمواد ، ولكن يوفر أيضًا حلول نظام للبيئات الخاصة مثل ورش العمل المدفوعة بالانفجار والأماكن الخطرة التي لا يمكن للموظفين الدخول إليها. من خلال مجموعة متنوعة من المباريات غير القياسية ، يمكن للمعالج أن يدرك رفع الأشكال المختلفة من الشغل ، بحيث يصل الحمل إلى حالة عائمة ذات جاذبية صفرية ، يمكن للمشغل أن يقلل من الحمل والتحرك والدوران والميل إلى الأمام ويمحد إلى الأمام. يتم وضع الحمل بسرعة ودقة في الموضع المحدد مسبقًا ، حيث يمكن لأي شخص تشغيل العدد الكبير الأصلي من العناصر التي يتم نقلها يدويًا.









