





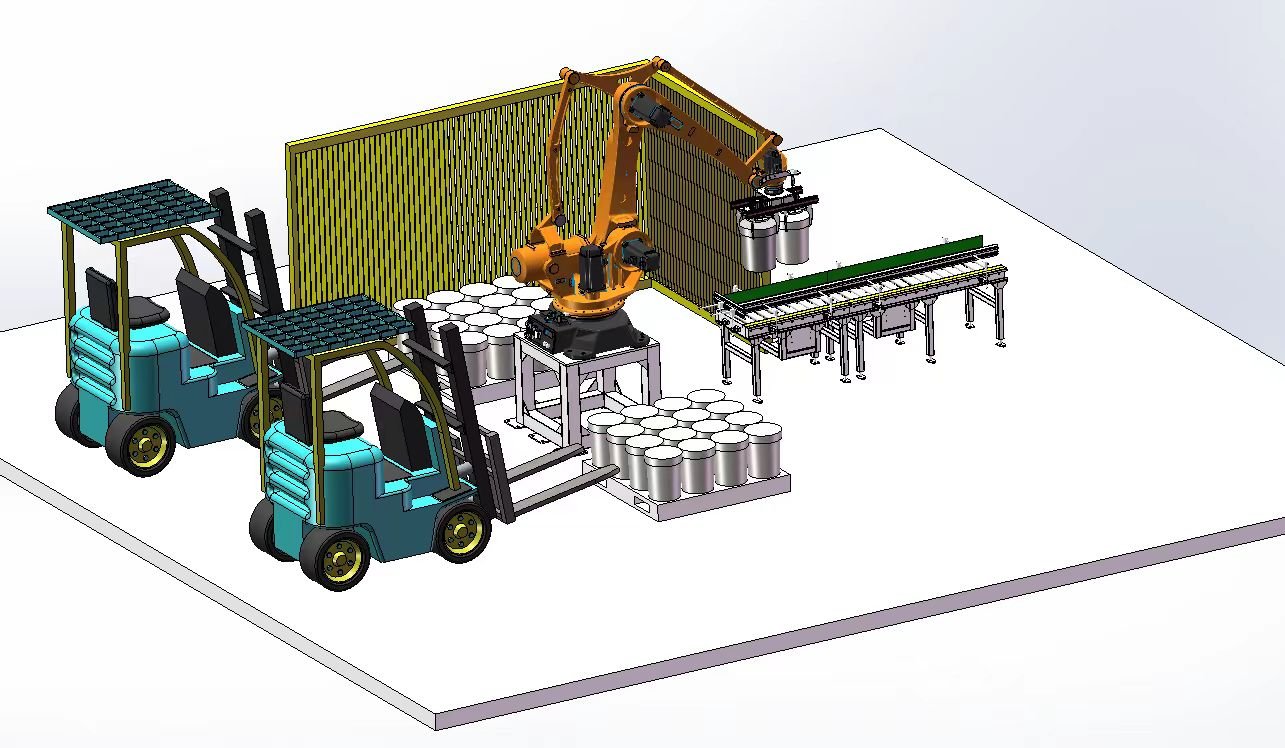



منصة نقالة أوتوماتيكية مشتركة
الآلة متعددة المفاصل تشبه ذراع الإنسان وتتميز بقدرتها على الحركة بمرونة مثل يد الإنسان. على سبيل المثال، عند مواجهة عائق، يمكن للروبوت متعدد المفاصل تجاوز العائق للوصول إلى الهدف، وهو أمر صعب بالنسبة للروبوت الصناعي من النوع القطبي أو الأسطواني العام. إذا كانت هناك حاجة لإكمال بعض الحركات الخاصة (حركة الكرنك)، فمن السهل أيضًا إكمال الروبوت متعدد المفاصل. يمكن للروبوت متعدد المفاصل أيضًا الانتقال من نقطة إلى أخرى في وقت قصير مثل يد الإنسان. إذا كان الروبوت متعدد المفاصل مزودًا بأجهزة استشعار تعمل باللمس والقوة في يديه ومعصميه، فيمكنه القيام بالمزيد والمزيد من الأعمال المعقدة.
عندما يدور مفصل في ذراع روبوت متعدد المفاصل بزاوية، فإن المفاصل الأخرى وقضبان التوصيل الخاصة بها ستنتج حركة في الفضاء. وبناء على ذلك، يصل المخلب إلى موضع جديد، كما يتغير اتجاه (موقف) الموضع. لذلك، يحتاج الروبوت العام متعدد المفاصل إلى التحكم فيه بواسطة الكمبيوتر. يحتوي الروبوت على كاشفات زاوية في كل مفصل. بالنظر إلى زاوية دوران كل مفصل، فإن مشكلة الحصول على الوضع المكاني والموقف المكاني لمخلب اليد تسمى مشكلة تحليل التحكم في الحركة. على العكس من ذلك، نظرًا لموضع واتجاه مخلب اليد، فإن مشكلة مقدار الزاوية التي يجب أن يدور بها كل قضيب توصيل مشترك تسمى مشكلة تركيب الحركة. مفتاح هذه المشاكل هو كيفية استخدام الكمبيوتر لتنفيذ التحويل والحساب أعلاه.








