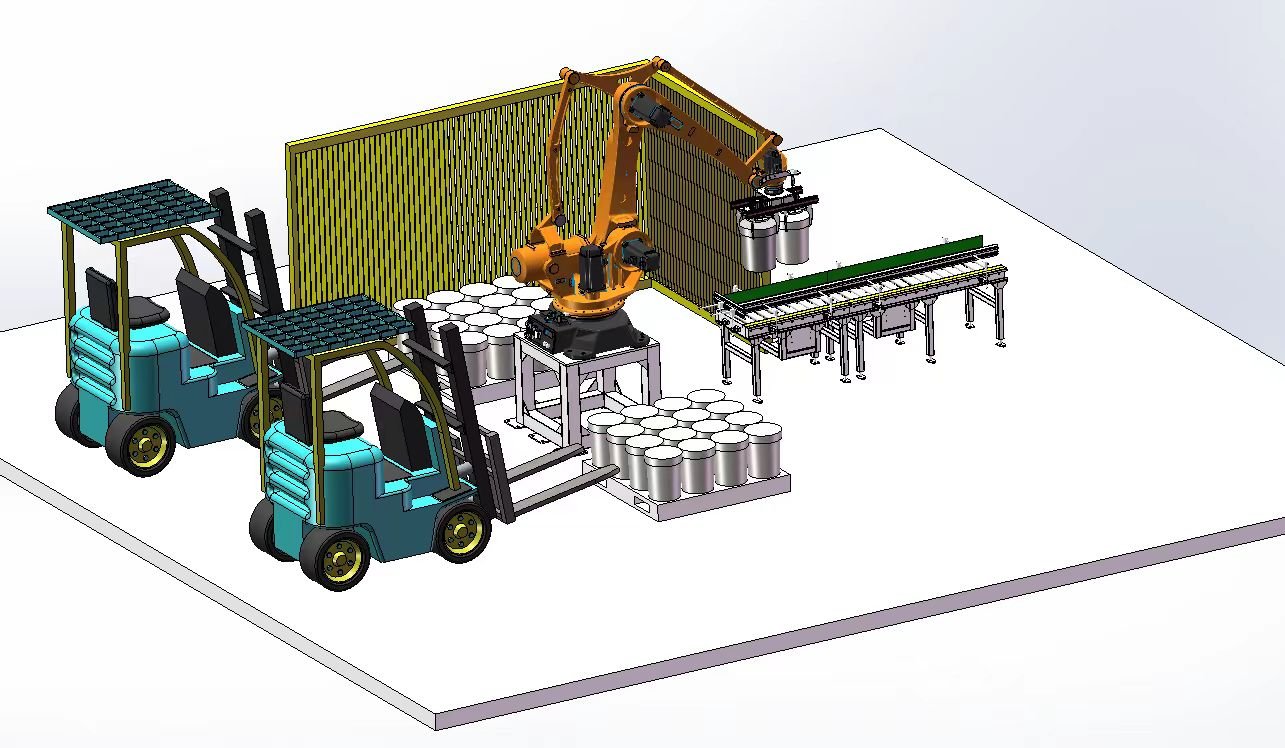



آلة تكديس الوصلات الأوتوماتيكية
تشبه الآلة متعددة المفاصل ذراع الإنسان، وتتميز بقدرتها على الحركة بمرونة كاليد البشرية. على سبيل المثال، عند مواجهة عائق، يستطيع الروبوت متعدد المفاصل تجاوزه للوصول إلى الهدف، وهو أمر يصعب على الروبوتات الصناعية ذات الإحداثيات القطبية أو الأسطوانية. وإذا تطلب الأمر بعض الحركات الخاصة (حركة الكرنك)، فإن الروبوت متعدد المفاصل يكون أسهل في التنفيذ. كما يستطيع الروبوت متعدد المفاصل الانتقال من نقطة إلى أخرى في وقت قصير كاليد البشرية. وإذا زُوّد الروبوت متعدد المفاصل بأجهزة استشعار للمس والقوة في يديه ومعصميه، فإنه يستطيع القيام بأعمال أكثر تعقيدًا.
عندما يدور مفصل في ذراع روبوت متعدد المفاصل بزاوية، فإن المفاصل الأخرى وقضبان التوصيل الخاصة بها ستنتج حركة في الفضاء. وبناءً على ذلك، يصل المخلب إلى موضع جديد، ويتغير اتجاه (وضع) الموضع أيضًا. لذلك، يحتاج الروبوت متعدد المفاصل العام إلى التحكم بواسطة الكمبيوتر. يحتوي الروبوت على كاشفات زاوية على كل مفصل. وبإعطاء زاوية دوران كل مفصل، فإن مشكلة الحصول على الموضع المكاني ووضع مخلب اليد تسمى مشكلة تحليل التحكم في الحركة. وعلى العكس من ذلك، وبإعطاء موضع ووضع مخلب اليد، فإن مشكلة مقدار الزاوية التي يجب أن يدور بها كل قضيب توصيل مفصل تسمى مشكلة تركيب الحركة. ومفتاح هذه المشاكل هو كيفية استخدام الكمبيوتر لإجراء التحويل والحساب أعلاه.