
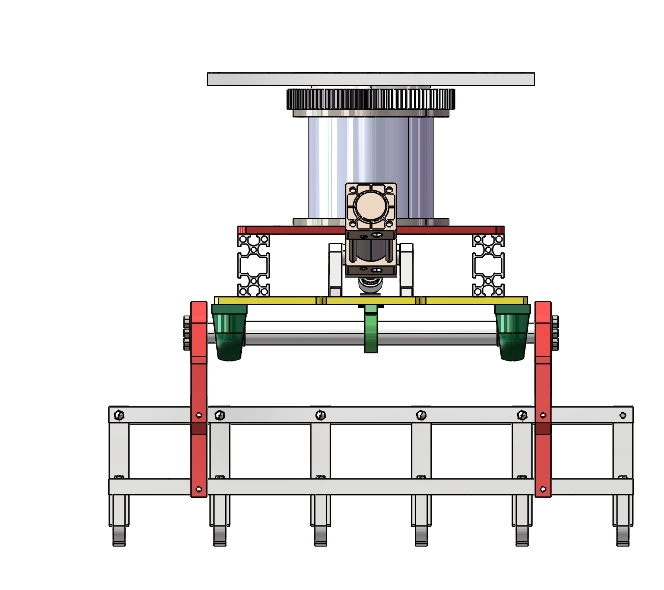
منصة روبوت منفرد مخلب القابض
1. يحتوي القابض على بنية بسيطة نسبيًا وتصميمًا شاملاً مضغوطًا ، مما لا يقلل فقط من تكاليف التصنيع والتجميع ، ولكنه يقلل أيضًا من نقاط الفشل المحتملة الناجمة عن الهياكل المعقدة.
2. منطق التحكم بسيط نسبيًا ، ويحتاج فقط إلى التحكم في حركة مخلب واحد ، مما يجعل من السهل تحقيق التحكم الدقيق أثناء البرمجة وتصحيح الأخطاء.
3. يمكن تجهيز القابض المقلد بمستشعرات عالية الدقة وأنظمة التحكم المتقدمة لتحديد موقع البضائع وفهمها بشكل أكثر دقة.
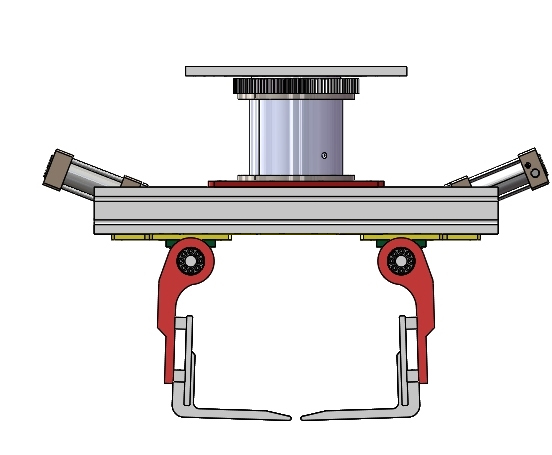
4. عندما يدرك مخلب واحد البضائع ، تتركز جميع قوة الإمساك على نقطة واحدة أو سطح واحد ، والتي يمكن أن توفر قوة استيعاب أكثر تركيزًا وثباتًا.
5. نظرًا لهيكله الصغير والمرن نسبيًا ، من الأسهل تشغيل القابض المقلق في مساحة صغيرة ويمكن تثبيته واستخدامه بشكل أكثر ملاءمة.
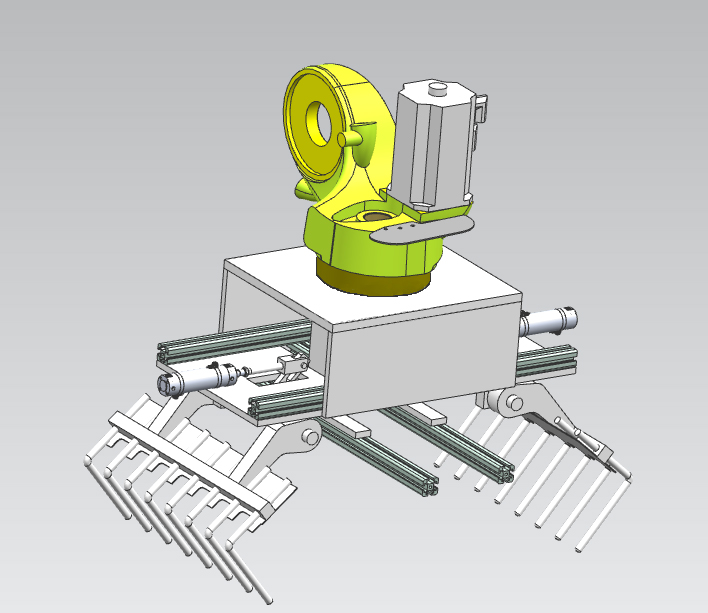
عادة ما تستخدم سبيكة الألمنيوم عالية القوة أو الفولاذ المقاوم للصدأ. إن جسم المخلب المصنوع من سبيكة الألمنيوم هو خفيف الوزن ، مما يمكن أن يقلل من حمل الروبوت ويحسن سرعة التشغيل والمرونة.

وهو متصل بذراع الروبوت المنصوص من خلال المفاصل عالية الدقة وأجهزة الإرسال. تستخدم المفاصل في الغالب المخفضات التوافقية أو المخفضات الكوكبية ذات الدقة العالية للإرسال وعزم دوران كبير ، مما قد يضمن دقة واستقرار حركة المخلب المفرد.

اعتمادًا على سيناريوهات التطبيق والكائنات ، فإن شكل ظهور القابض للمخابح الواحد يحتوي على مجموعة متنوعة من التصميمات.

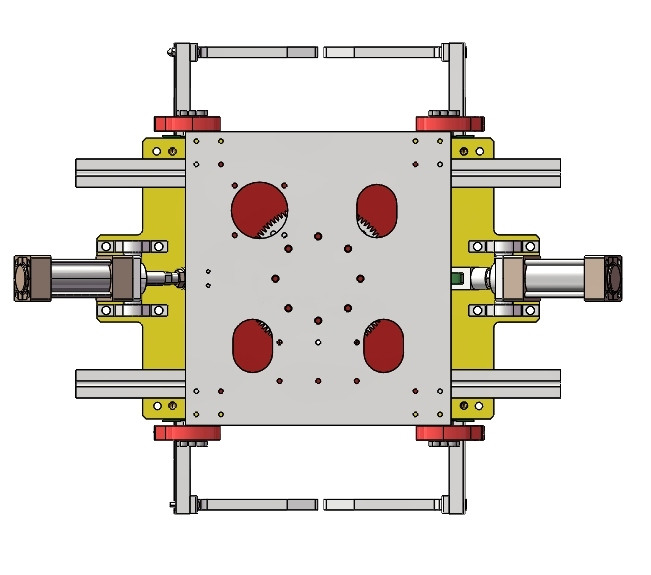
يمكن تعديل قوة الاستياء والموضع تلقائيًا وفقًا لوزن البضائع وشكلها وحجمها.

تم دمجها بعمق مع نظام التحكم في الروبوت المنصوص عليه ، ويمكنه إكمال المهام المناسبة بالتعاون مع الذراع الآلي وفقًا لبرامج وتعليمات مسبقات مسبق.




