
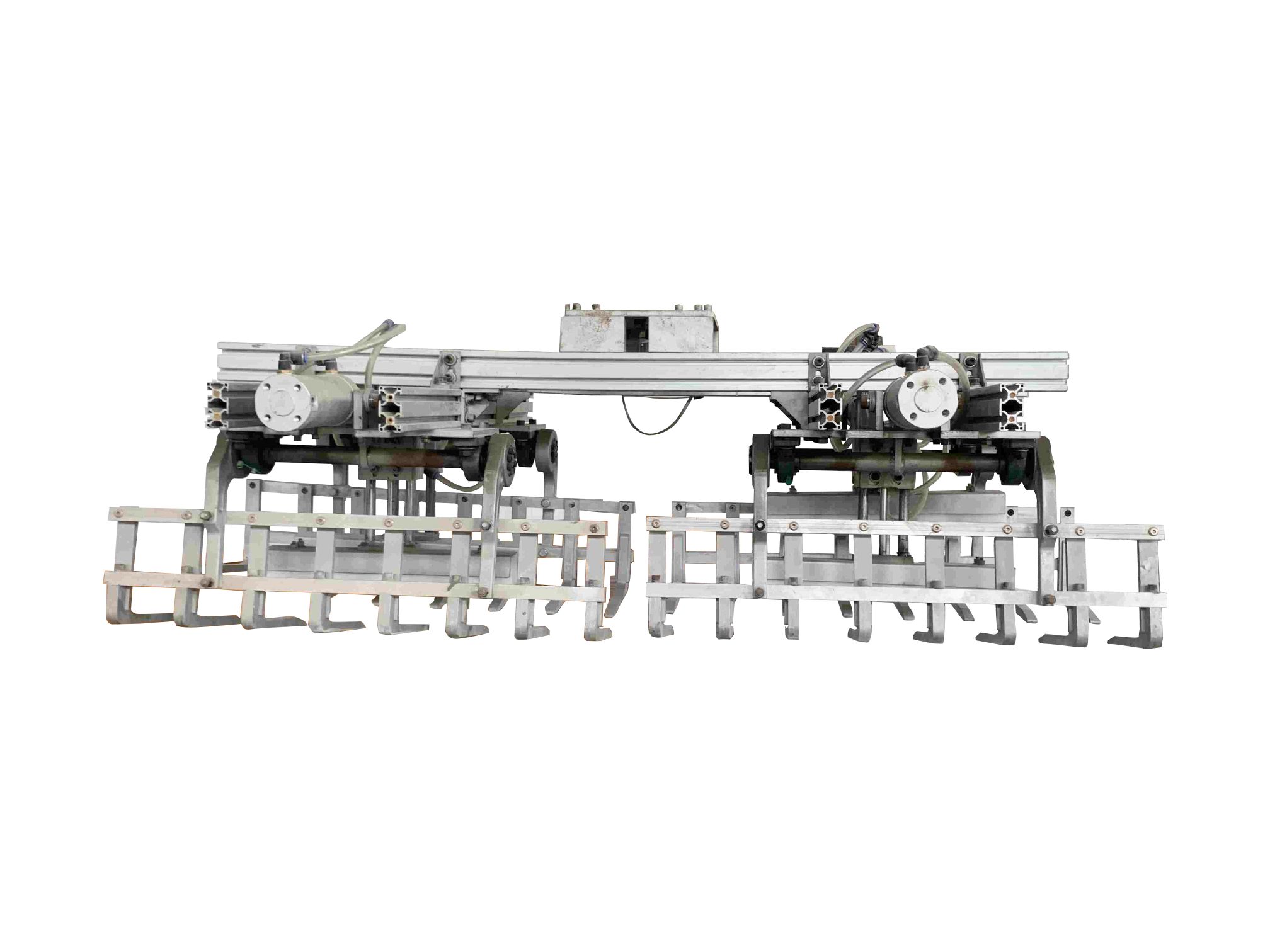




Robot Robot Double Claw Gripper
1. يمكّن تصميم المخلب المزدوج الروبوت من الاستيلاء على عنصرين في نفس الوقت أو الاستيلاء على عناصر من مواقع مختلفة ، مما يقلل بشكل فعال من عدد عمليات الاستيلاء وبالتالي تقصير وقت المنصة.
2. عادةً ما يتم تجهيزه بنظام محرك أقوى وتصميم هيكلي ، تعمل المخالبان معًا لتفريق الحمل ويمكن أن تحمل وزنًا أكبر.
3. يمكن للمخالبين أن تتحرك بشكل مستقل أو بالتنسيق ، ويمكن أن يعدلوا طريقة الاستيلاء بشكل مرن وفقًا لشكل وحجم البضائع.
4. يمكن ضبط المخالب المزدوجة لتحقيق وضع أكثر دقة عند وضع البضائع على المنصات أو المواقع المعينة.
5. يتم توزيع المخالب المزدوجة بشكل متماثل أو تصميمها وفقًا لمبادئ الميكانيكا ، والتي يمكن أن تحافظ على التوازن بشكل أفضل عند الاستيلاء على البضائع. يمكن للمخالب المزدوجة تعويض القوة غير المتوازنة للبضائع عن طريق ضبط القوة والموقف.
يتكون من مخالب مستقلة يمكن أن تعمل معًا. عادة ما تكون المخالب مصنوعة من سبائك الألومنيوم عالية القوة أو الفولاذ المقاوم للصدأ. لديهم خصائص الوزن الخفيف والقوة العالية ومقاومة التآكل ، ويمكن أن تتكيف مع مختلف بيئات العمل القاسية.
 إنه متصل بنهاية ذراع الروبوت الروبوت من خلال المفاصل والمحامل وأجهزة الإرسال عالية الدقة لضمان استقرار ودقة المخالب المزدوجة أثناء الحركة.
إنه متصل بنهاية ذراع الروبوت الروبوت من خلال المفاصل والمحامل وأجهزة الإرسال عالية الدقة لضمان استقرار ودقة المخالب المزدوجة أثناء الحركة.
 يتم استخدام مستشعر الضغط لمراقبة قوة الإمساك بالمخالب في الوقت الفعلي لمنع البضائع من التضرار بسبب قوة الاستياء المفرطة أو السقوط بسبب عدم كفاية قوة الاستيلاء ؛ يمكن لمستشعر الموضع ردود الفعل بدقة على موقف وموقف المخالب.
يتم استخدام مستشعر الضغط لمراقبة قوة الإمساك بالمخالب في الوقت الفعلي لمنع البضائع من التضرار بسبب قوة الاستياء المفرطة أو السقوط بسبب عدم كفاية قوة الاستيلاء ؛ يمكن لمستشعر الموضع ردود الفعل بدقة على موقف وموقف المخالب.

يمكن تبديل أوضاع الاستيلاء المختلفة بشكل مرن وفقًا لشكل وحجم ووزن البضائع ، مثل الاستيلاء المتوازي ، والاستيلاء على المشبك الجانبي.
 يمكن للمخالب المزدوجة ضبط قوة الإمساك تلقائيًا وموضعها وفقًا للوضع الفعلي للبضائع. عند الاستيلاء على سلع أخف ، ستقلل المخالب تلقائيًا من قوة الإمساك لتجنب الأضرار التي لحقت بالسلع.
يمكن للمخالب المزدوجة ضبط قوة الإمساك تلقائيًا وموضعها وفقًا للوضع الفعلي للبضائع. عند الاستيلاء على سلع أخف ، ستقلل المخالب تلقائيًا من قوة الإمساك لتجنب الأضرار التي لحقت بالسلع.




