
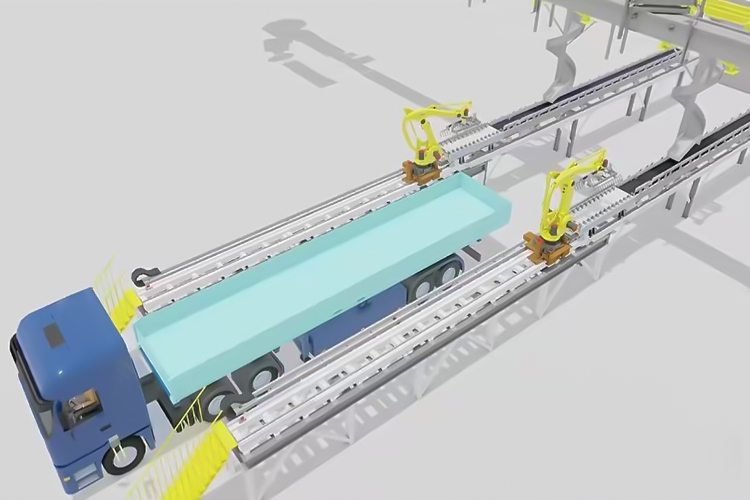
نظام تحميل وتفريغ أكياس الشاحنات
نظام تحميل وتفريغ أكياس الشاحنات هو أحد أنظمة تحميل الشاحنات ذات الذراع الروبوتية عبر الإنترنت، الصناعات المطبقة:
1. الأسمنت/مواد البناء: أكياس أسمنت 50 كجم، روبوت ذو 6 محاور عالي الحمولة + كوب شفط مفرغ، 600-2000 كيس/ساعة
2. الأسمدة/الأعلاف: أكياس 25 كجم إلى 40 كجم، روبوت متوسط الحمل + ماسك
3. الأطعمة/المشروبات/العلب والمعبأة في زجاجات: روبوت BLMC + أداة إمساك
4. أكياس المواد الكيميائية/البلاستيكية/الأطنان، البراميل: روبوت جسري عالي التحمل + حبال
5. نظام تحميل وتفريغ أكياس الملح الصناعي للشاحنات
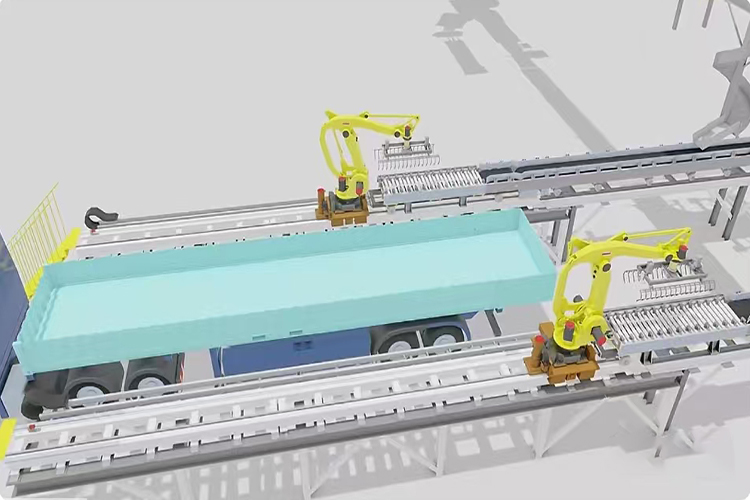
نظام التحميل بالذراع الروبوتية هو جهاز لوجستي آلي يستخدم الروبوتات الصناعية والرؤية الذكية وأنظمة النقل لتحقيق عمليات تحميل بضائع فعّالة ودقيقة. يُستخدم على نطاق واسع في صناعات مثل الأسمنت والأسمدة والأعلاف والأغذية والمواد الكيميائية، وهو مناسب بشكل خاص لتحميل البضائع المعبأة في أكياس أو صناديق أو ذات أشكال منتظمة.
I. تكوين النظام
(1) الذراع الروبوتية (الروبوت الصناعي)
النوع: يستخدم في الغالب روبوت مفصلي بأربعة محاور (مثل BS-180-3100) (سيناريو التحميل الخفيف عالي السرعة).
الحمل: حدد وفقًا لوزن البضائع (على سبيل المثال، عادةً ما تكون أكياس الأسمنت 50 كجم/كيس، ويلزم روبوت بحمولة ≥120 كجم).
المستجيب النهائي:
كأس الشفط الفراغي: مناسب للمواد المعبأة في أكياس مسطحة (مثل الأسمنت والدقيق).
الممسك/المشبك: يستخدم للعناصر المعبأة أو غير المنتظمة.
جهاز الشفط المغناطيسي: سيناريو التغليف المعدني.
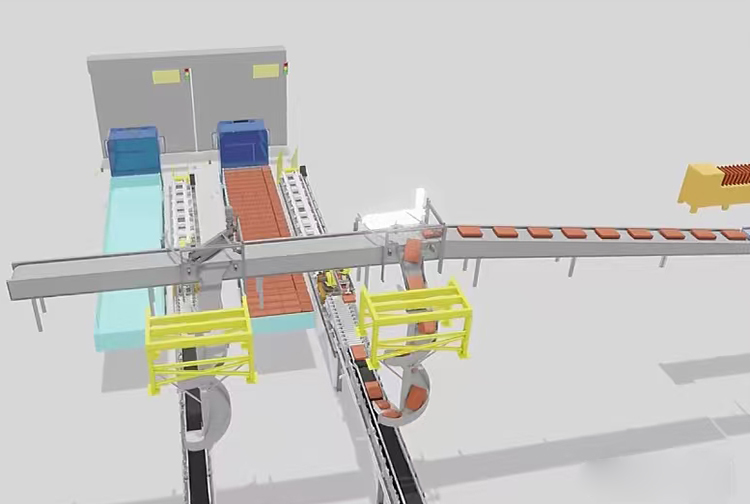
2) نظام النقل
ناقل التغذية: ناقل الحزام أو خط الأسطوانة أو ناقل السلسلة، الذي ينقل البضائع إلى منطقة عمل الذراع الروبوتية.
المحول (اختياري): يقوم بفرز أنواع متعددة من البضائع.
وحدة الوزن/التفتيش: تضمن أن يكون وزن أو مظهر كل قطعة من البضائع مؤهلاً.
(3) نظام تحديد المواقع البصرية
كاميرا ثلاثية الأبعاد/ماسح ضوئي ليزري: يحدد حجم العربة، وحالة تكديس البضائع، وموضع السيارة.
الخوارزمية: تقوم بإنشاء مسار التكديس الأمثل من خلال تحليل سحابة النقاط وتدعم التعديل الديناميكي (مثل حركة السيارة أو إزاحة البضائع).
(4) نظام التحكم
PLC (Siemens، Mitsubishi): ينسق ذراع الروبوت، والحزام الناقل، والمستشعر.
واجهة الإنسان والآلة (HMI): توفر لوحة تشغيل وتدعم التبديل بين الوضع اليدوي والتلقائي.
إرساء البيانات: يمكن توصيله بنظام إدارة المستودعات (WMS) أو نظام إدارة النقل (TMS).
ثانيا. سير العمل
1. تحميل البضائع: ينقل الناقل البضائع إلى محطة التقاط الذراع الروبوتية.
2. تحديد موقع المركبة: يقوم النظام المرئي بمسح حجم العربة وحالة التحميل الحالية.
3. تخطيط المسار: يقوم النظام بحساب التسلسل الأمثل للالتقاط والتكديس (مثل التكديس المتدرج لمنع الانهيار).
4. الإمساك والوضع: يكمل ذراع الروبوت عملية التحميل وفقًا للمسار المخطط له ويضبط وضعيته في الوقت الفعلي.
5. ردود الفعل عند اكتمال التحميل: بعد التحميل، يرسل النظام إشارة وتنطلق السيارة.
ثالثًا. الصناعات المطبقة
1. الأسمنت/مواد البناء: أكياس أسمنت 50 كجم، روبوت ذو 6 محاور عالي الحمولة + كوب شفط مفرغ، 600-2000 كيس/ساعة
2. الأسمدة/الأعلاف: أكياس 25 كجم إلى 40 كجم، روبوت متوسط الحمل + ماسك
3. الأطعمة/المشروبات/العلب والمعبأة في زجاجات: روبوت BLMC + أداة الإمساك |
4. أكياس المواد الكيميائية/البلاستيكية/الأطنان، البراميل: روبوت جسري عالي التحمل + حبال
5. نظام تحميل وتفريغ أكياس الملح الصناعي للشاحنات
رابعًا: توصيات الاختيار
بيئة الغبار العالي (مثل مصانع الأسمنت): اختر الروبوت المقاوم للغبار + نظام إزالة الغبار.
البضائع الثقيلة (مثل أكياس الطن): ضع في اعتبارك الروبوت القنطري
متطلبات الدقة العالية (مثل صناديق الأدوية): مع نظام رؤية ثلاثي الأبعاد عالي الدقة.




